- 拉夫堡大学提出ADAS协作式动作管理控制架构理念
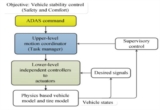
- 拉夫堡大学提出ADAS协作式动作管理控制架构理念据外媒报道,英国拉夫堡大学与捷豹路虎提出了一项ADAS系统协作式动作管理控制架构理念,旨在提升所有车辆的安全性及舒适性,适用于所有ADAS规格。ADAS系统的物理建模与控制架构是利用MATLAB/Simulink来执行的,该类开放性平台可供各方开展进一步的研发工作。有一支团队预计到,在动态模式下,该架构不易受细节变化的影响。研究团队在模拟器上运行各类综合性信息,旨在分析在车辆变道时,各独立系统是如何影响车辆行驶轨迹的。详见正文。
2021-04-21







